Colloquium aankondiging
Faculteit Engineering Technology
Afdeling Design, Production and Management
Master opleiding Mechanical Engineering
In het kader van zijn/haar doctoraalopdracht zal
Kuiper, Y.W.A. (Yme Wytse)
een voordracht houden getiteld:
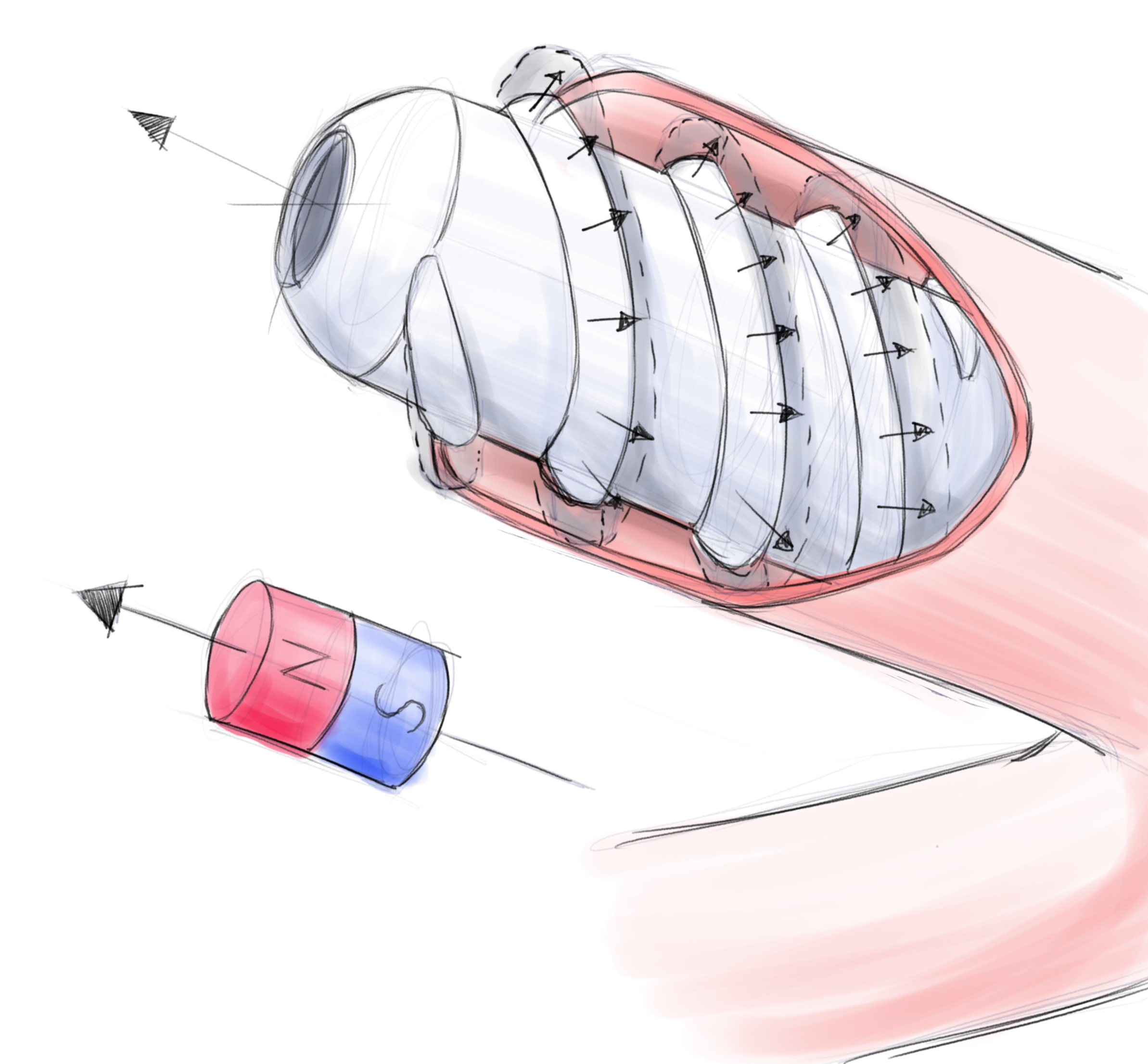
Design of a Magnetically Actuated Radial Adaptation Mechanism for a Capsule Robot
| Datum | 27-02-2024 |
| Tijd | 13:00 |
| Zaal | HT-900 |
Samenvatting
In this thesis, a new concept for a magnetically actuated radial adaptation mechanism for surface crawling capsule robots is proposed. The intended operating environment for the capsule robot is the abdominal aorta. To achieve surface crawling the capsule robot has to stay in contact with the vascular wall. Since the abdominal aorta does not have a constant diameter, the capsule robot has to be able to adapt itself to the diametric change. The surface crawling also introduces a risk of damaging the vascular wall. Therefore active control over the diameter of the capsule robot is required to balance between minimizing the damage to the vascular wall and optimizing the surface crawling efficiency. Thus a method has to be found that can actively control the pressure of the capsule robot on the vascular wall. Besides the surface crawling the size of the robot also introduces challenges. Due to the size, there is limited space for electronic devices such as actuators or batteries. An alternative to power the capsule robot would be magnetic actuation. Magnetic actuation uses embedded permanent magnets to actuate the capsule robot with an external magnetic field.
In this thesis, a design of a capsule robot is proposed, with a focus on the magnetic actuation and radial adaptation mechanism. The capsule robot design is theoretical and serves to illustrate the functioning of the magnetic actuation and radial expansion mechanisms. The proposed mechanisms are validated through the use of models and experimental methods. The final design consists of foldable structures that can expand or collapse to increase or decrease the radius of the capsule robot by a factor of 3. The surface crawling and the radial adaptation mechanism are actuated by the same magnetic actuation mechanism. Further research is still required, but the models and experiments show promising results.
Examencommissie |
voorzitter Handtekening d.d. |
|
| Prof. Dr. Ir. Sarthak Misra Dr. V. Kalpathy Venkiteswaran Dr. Ir. M. Nijenhuis |
(voorzitter) (begeleider) (extern lid) |
|